

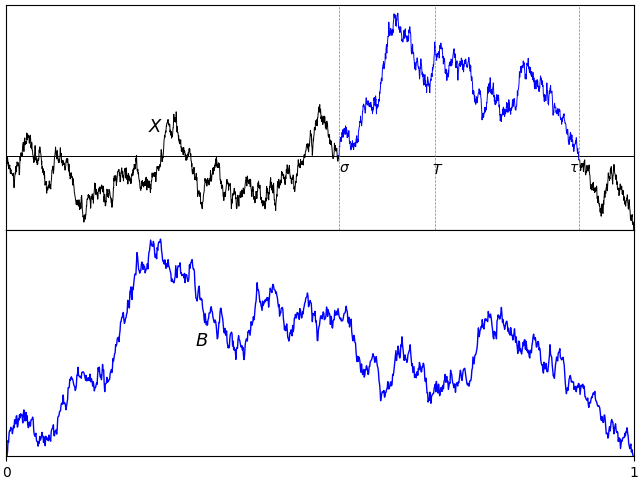
A normalized Brownian excursion is a nonnegative real-valued process with time ranging over the unit interval, and is equal to zero at the start and end time points. It can be constructed from a standard Brownian motion by conditioning on being nonnegative and equal to zero at the end time. We do have to be careful with this definition, since it involves conditioning on a zero probability event. Alternatively, as the name suggests, Brownian excursions can be understood as the excursions of a Brownian motion X away from zero. By continuity, the set of times at which X is nonzero will be open and, hence, can be written as the union of a collection of disjoint (and stochastic) intervals (σ, τ).
In fact, Brownian motion can be reconstructed by simply joining all of its excursions back together. These are independent processes and identically distributed up to scaling. Because of this, understanding the Brownian excursion process can be very useful in the study of Brownian motion. However, there will by infinitely many excursions over finite time periods, so the procedure of joining them together requires some work. This falls under the umbrella of ‘excursion theory’, which is outside the scope of the current post. Here, I will concentrate on the properties of individual excursions.
In order to select a single interval, start by fixing a time T > 0. As XT is almost surely nonzero, T will be contained inside one such interval (σ, τ). Explicitly,
 |
(1) |
so that σ < T < τ < ∞ almost surely. The path of X across such an interval is t ↦ Xσ + t for time t in the range [0, τ - σ]. As it can be either nonnegative or nonpositive, we restrict to the nonnegative case by taking the absolute value. By invariance, S-1/2XtS is also a standard Brownian motion, for each fixed S > 0. Using a stochastic factor S = τ – σ, the width of the excursion is normalised to obtain a continuous process {Bt}t ∈ [0, 1] given by
 |
(2) |
By construction, this is strictly positive over 0 < t < 1 and equal to zero at the endpoints t ∈ {0, 1}.
The only remaining ambiguity is in the choice of the fixed time T.
Lemma 1 The distribution of B defined by (2) does not depend on the choice of the time T > 0.
Proof: This follows from scaling invariance of Brownian motion. Consider any other fixed positive time T̃, and use the construction above with T̃, σ̃, τ̃, B̃ in place of T, σ, τ, B respectively. We need to show that B̃ and B have the same distribution. Using the scaling factor S = T̃/T, then X′t = S-1/2XtS is a standard Brownian motion. Also, σ′= σ̃/S and τ′= τ̃/S are random times given in the same way as σ and τ, but with the Brownian motion X′ in place of X in (1). So,
 |
has the same distribution as B. ⬜
This leads to the definition used here for Brownian excursions.
Definition 2 A continuous process {Bt}t ∈ [0, 1] is a Brownian excursion if and only it has the same distribution as (2) for a standard Brownian motion X and time T > 0.
In fact, there are various alternative — but equivalent — ways in which Brownian excursions can be defined and constructed.
- As a normalized excursion away from zero of a Brownian motion. This is definition 2.
- As a normalized excursion away from zero of a Brownian bridge. This is theorem 6.
- As a Brownian bridge conditioned on being nonnegative. See theorem 9 below.
- As the sample path of a Brownian bridge, translated so that it has minimum value zero at time 0. This is a very interesting and useful method of directly computing excursion sample paths from those of a Brownian bridge. See theorem 12 below, sometimes known as the Vervaat transform.
- As a Markov process with specified transition probabilities. See theorem 15 below.
- As a transformation of Bessel process paths, see theorem 16 below.
- As a Bessel bridge of order 3. This can be represented either as a Bessel process conditioned on hitting zero at time 1., or as the vector norm of a 3-dimensional Brownian bridge. See lemma 17 below.
- As a solution to a stochastic differential equation. See theorem 18 below.

 be a fixed time. Then, the process
be a fixed time. Then, the process 
 is independent from
is independent from  .
.  , we just need to show that
, we just need to show that ![{{\mathbb E}[B_sX_t]}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathbb+E%7D%5BB_sX_t%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) is zero. Using the covariance structure
is zero. Using the covariance structure ![{{\mathbb E}[X_sX_t]=s\wedge t}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathbb+E%7D%5BX_sX_t%5D%3Ds%5Cwedge+t%7D&bg=ffffff&fg=000000&s=0&c=20201002) we obtain,
we obtain,![\displaystyle {\mathbb E}[B_sX_t]={\mathbb E}[X_sX_t]-\frac sT{\mathbb E}[X_TX_t]=s-\frac sTT=0](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++%7B%5Cmathbb+E%7D%5BB_sX_t%5D%3D%7B%5Cmathbb+E%7D%5BX_sX_t%5D-%5Cfrac+sT%7B%5Cmathbb+E%7D%5BX_TX_t%5D%3Ds-%5Cfrac+sTT%3D0+&bg=ffffff&fg=000000&s=0&c=20201002)
![{\{B_t\}_{t\in[0,T]}}](https://s0.wp.com/latex.php?latex=%7B%5C%7BB_t%5C%7D_%7Bt%5Cin%5B0%2CT%5D%7D%7D&bg=ffffff&fg=000000&s=0&c=20201002) is a Brownian bridge on the interval
is a Brownian bridge on the interval ![{[0,T]}](https://s0.wp.com/latex.php?latex=%7B%5B0%2CT%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) if and only it has the same distribution as
if and only it has the same distribution as  for a standard Brownian motion X.
for a standard Brownian motion X. , then B is called a standard Brownian bridge.
, then B is called a standard Brownian bridge.  . See lemma
. See lemma  has the standard
has the standard  are independent normal with zero mean and unit variance. A well known fact of such distributions is that they are invariant under rotations, which has the following consequence. The distribution of
are independent normal with zero mean and unit variance. A well known fact of such distributions is that they are invariant under rotations, which has the following consequence. The distribution of  is invariant under rotations of
is invariant under rotations of  and, hence, is fully determined by the values of
and, hence, is fully determined by the values of  and
and  . This is known as the
. This is known as the  , and denoted by
, and denoted by  . The moment generating function can be computed,
. The moment generating function can be computed,![\displaystyle M_Z(\lambda)\equiv{\mathbb E}\left[e^{\lambda Z}\right]=\left(1-2\lambda\right)^{-\frac{n}{2}}\exp\left(\frac{\lambda\mu}{1-2\lambda}\right),](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++M_Z%28%5Clambda%29%5Cequiv%7B%5Cmathbb+E%7D%5Cleft%5Be%5E%7B%5Clambda+Z%7D%5Cright%5D%3D%5Cleft%281-2%5Clambda%5Cright%29%5E%7B-%5Cfrac%7Bn%7D%7B2%7D%7D%5Cexp%5Cleft%28%5Cfrac%7B%5Clambda%5Cmu%7D%7B1-2%5Clambda%7D%5Cright%29%2C+&bg=ffffff&fg=000000&s=0&c=20201002)
 with real part bounded above by 1/2.
with real part bounded above by 1/2. of an n-dimensional
of an n-dimensional  be its
be its  has the following property. For times
has the following property. For times  , conditional on
, conditional on  ,
,  is distributed as
is distributed as  . This is known as the `n-dimensional’ squared Bessel process, and denoted by
. This is known as the `n-dimensional’ squared Bessel process, and denoted by  .
.
![\displaystyle dX = 2\sum_iB^i\,dB^i+\sum_id[B^i].](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++dX+%3D+2%5Csum_iB%5Ei%5C%2CdB%5Ei%2B%5Csum_id%5BB%5Ei%5D.+&bg=ffffff&fg=000000&s=0&c=20201002)
![{[B^i]_t=t}](https://s0.wp.com/latex.php?latex=%7B%5BB%5Ei%5D_t%3Dt%7D&bg=ffffff&fg=000000&s=0&c=20201002) , the final term on the right-hand-side is equal to
, the final term on the right-hand-side is equal to  . Also, the covarations
. Also, the covarations ![{[B^i,B^j]}](https://s0.wp.com/latex.php?latex=%7B%5BB%5Ei%2CB%5Ej%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) are zero for
are zero for  from which it can be seen that
from which it can be seen that
![{[W]_t=t}](https://s0.wp.com/latex.php?latex=%7B%5BW%5D_t%3Dt%7D&bg=ffffff&fg=000000&s=0&c=20201002) . By
. By 
 is not Lipschitz continuous. It is known that (
is not Lipschitz continuous. It is known that ( . This can be done either by specifying its distributions in terms of chi-square distributions or by the SDE (
. This can be done either by specifying its distributions in terms of chi-square distributions or by the SDE ( with moment generating function given by equation (
with moment generating function given by equation ( and
and  are independent, then
are independent, then  has moment generating function
has moment generating function  and, therefore, has the
and, therefore, has the  distribution. That such distributions do indeed exist can be seen by constructing them. The
distribution. That such distributions do indeed exist can be seen by constructing them. The  distribution is a special case of the
distribution is a special case of the  . If
. If  is a sequence of independent random variables with the standard normal distribution and T independently has the
is a sequence of independent random variables with the standard normal distribution and T independently has the  , then
, then  , which can be seen by computing its moment generating function. Adding an independent
, which can be seen by computing its moment generating function. Adding an independent  .
. .
. distribution.
distribution.  satisfies certain continuity conditions. Many of the standard processes we study satisfy the Feller property, such as
satisfies certain continuity conditions. Many of the standard processes we study satisfy the Feller property, such as  .
.
 conditional on the history up until an earlier time
conditional on the history up until an earlier time  . Equivalently,
. Equivalently, ![\displaystyle {\mathbb E}[f(X_t)\mid\mathcal{F}_s]=P_{t-s}f(X_s)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++%7B%5Cmathbb+E%7D%5Bf%28X_t%29%5Cmid%5Cmathcal%7BF%7D_s%5D%3DP_%7Bt-s%7Df%28X_s%29+&bg=ffffff&fg=000000&s=0&c=20201002)
 . The strong Markov property generalizes this idea to arbitrary stopping times.
. The strong Markov property generalizes this idea to arbitrary stopping times. be a transition function.
be a transition function. , conditioned on
, conditioned on  the process
the process  is Markov with the given transition function and with respect to the filtration
is Markov with the given transition function and with respect to the filtration  .
.  . The reflection principle
. The reflection principle defined to be equal to B up until time
defined to be equal to B up until time 
 . If
. If  then either the process itself ends up above K or it hits K and then drops below this level by time t, in which case
then either the process itself ends up above K or it hits K and then drops below this level by time t, in which case  . So, by the reflection principle,
. So, by the reflection principle, 
 . It will be assumed that E is
. It will be assumed that E is  , topological manifolds and, indeed, any open or closed subset of another lccb space. Such spaces are always
, topological manifolds and, indeed, any open or closed subset of another lccb space. Such spaces are always  denotes the continuous real-valued functions
denotes the continuous real-valued functions  , the set
, the set  is compact. Equivalently, its extension to the
is compact. Equivalently, its extension to the  of E given by
of E given by  is continuous. The set
is continuous. The set 
 , so it makes sense to talk of transition probabilities and functions on E.
, so it makes sense to talk of transition probabilities and functions on E. ,
,  .
.  is continuous with respect to the norm topology on
is continuous with respect to the norm topology on  .
.
 be the sigma-algebra generated by
be the sigma-algebra generated by  . The Markov property then says that, for any times
. The Markov property then says that, for any times  and bounded measurable function
and bounded measurable function  conditional on
conditional on  . Equivalently,
. Equivalently, ![\displaystyle {\mathbb E}\left[f(X_t)\mid\mathcal{F}_s\right]={\mathbb E}\left[f(X_t)\mid X_s\right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++%7B%5Cmathbb+E%7D%5Cleft%5Bf%28X_t%29%5Cmid%5Cmathcal%7BF%7D_s%5Cright%5D%3D%7B%5Cmathbb+E%7D%5Cleft%5Bf%28X_t%29%5Cmid+X_s%5Cright%5D+&bg=ffffff&fg=000000&s=0&c=20201002)
 . A process X is Markov with respect to
. A process X is Markov with respect to  if it is adapted and (
if it is adapted and (